A fair performance comparison of implementations of different programming languages is difficult.
Ideally one measures the performance for a wide range of algorithms and programming tasks.
However each language will have different application areas where it performs best.
In the following we compare the performance of Clojure, Ruby, and Python on the factorial function.
While the results might not allow to make general statements about the performance of each language interpreter, it gives us an idea of what the individual strengths and weaknesses are.
The measurements were performed using an AMD Ryzen 7 4700U with 16GB RAM and 8 cores.
For the Clojure measurements I used the Criterium benchmarking library.
For the Ruby measurements I used the benchmark module of the standard library.
For the Python measurements I used the Pyperf module.
See this Gist for the benchmarking source code.
Implementations
There are different ways to implement the factorial function.
Recursive
In functional programming the recursive implementation of the factorial function is the most common.
Note that we need to initialise the result with 1N (big number type) instead of 1, because the rebinding of the result variable does not allow a dynamic type change.
In Ruby we can implement factorial using a while loop.
A similar approach in Python for improving performance is to use the Cython compiler.
Here the method is implemented in a dialect of Python which uses static typing.
Ruby only has the RubyInline library which requires to reimplement the method in C.
classFactorialinlinedo|builder|builder.c"
long factorial(int max) {
int i=max, result=1;
while (i >= 2) { result *= i--; }
return result;
}"endend
Other implementations
In Python one can instead use the factorial from the math module.
In Clojure one can apply the multiplication function to a range of numbers, since multiplication in Clojure can take an arbitrary number of arguments.
(defnfactorial[n](apply*'(range1(incn))))
Only Clojure supports parallelism.
For computing factorials we can use the fold function.
Here we split the task into two chunks.
Unfortunately range does not support random access, so we need to convert it to a vector.
Finally if the input argument is known at compile time, one can use a macro in Clojure.
This obviously is going to have much better performance than all the other implementations.
First we compared the performance of computing the factorial of 20.
implementation
Clojure 1.12.0
Ruby 3.4.1
Python 3.13.1
recursive
104 ns
538 ns
957 ns
loop
164 ns
665 ns
717 ns
reduce
116 ns
1512 ns
718 ns
unchecked integer
44.4 ns
77.6 ns
41.6 ns
fold
6211 ns
n/a
n/a
math library
n/a
n/a
45.4 ns
apply
178 ns
n/a
n/a
macro
0.523 ns
n/a
n/a
The Clojure implementation makes use of the JVM and the resulting performance for recursive, loop, and reduce implementation of factorial is the best.
Forcing fold, which is a parallel version of reduce, to use 2 threads, does not yield better performance.
Note that the recursive implementation of Ruby is faster than the Python implementation.
This is maybe due to the YJIT optimizing JIT compiler build into the Ruby interpreter.
Also note that the loop implementation in Python is faster than the recursive implementation.
Surprisingly the reduce implementation in Python has comparable performance to the loop implementation.
The factorial implementation of the Python math library is very fast.
The Python math library implementation uses a lookup table for arguments up to 20.
Since the result of factorial of 20 fits into a 64 bit integer, one can use unchecked integers in Clojure to get a fast implementation.
The resulting implementation is slightly faster than the Python math library implementation.
Note that the factorial implementation of the Python math library does not perform unchecked 64 bit integer math.
In Python one can use the Cython dialect to use the C compiler and unchecked math with 64 bit integers.
Finally one can use RubyInline to embed a C implementation in a Ruby program.
The Cython implementation is the fastest for computing factorial of 20.
Finally using a macro, which of the three languages only Clojure supports, is faster than all other implementations but obviously limited to cases where the function argument is known at compile time.
Factorial of 100
When computing the factorial of arguments greater than 20, big integers are required.
In the following table the performance of computing factorials of 100 is shown.
implementation
Clojure 1.12.0
Ruby 3.4.1
Python 3.13.1
recursive
3148 ns
27191 ns
5520 ns
loop
3434 ns
32426 ns
4430 ns
reduce
2592 ns
28851 ns
3790 ns
fold
16012 ns
n/a
n/a
math library
n/a
n/a
599 ns
apply
2624 ns
n/a
n/a
macro
3.70 ns
n/a
n/a
Again the recursive, loop, and reduce implementations are fastest in Clojure.
Also again using fold with two chunks fares much worse.
The Ruby implementations fare much worse for big numbers.
Maybe the implementation of big numbers in Ruby has much worse performance than the Python and Clojure one.
Overall the implementation in the Python math library is the fastest candidate (unless we can use a Clojure macro of course).
Conclusion
As stated before, one cannot generalize this limited performance comparison.
However maybe one can maybe make the following observations:
The combination of Clojure and the JVM allows for better performance of dynamically typed programs.
The performance of numerical algorithms in Clojure can be further improved when using unchecked math. The performance in this case is even getting close to Cython.
Being able to call an AOT compiled C-implementation of a numerical algorithm still gives the best performance as can be seen by the Python math library implementation of factorial. The fact that this method exists is maybe a reflection of the fact that Python has the strongest support when it comes to numerical libraries.
Only Clojure supports macros, which allow for results to be computed at compile time instead of at runtime, if the arguments are known early.
Currently only Clojure supports parallel algorithms such as fold and pmap. However they only offer performance benefits for larger tasks than the one tested here.
Any suggestions and comments are welcome.
Updates:
Replaced Numba implementation with Cython.
Add type hints to unchecked math Clojure implementation.
Add RubyInline implementation.
Because Python and Ruby bind methods late, there is a significant overhead when calling methods.
In the following the identity function is tested in Clojure, Ruby, and Python.
It looks like the JVM has even inlined the Clojure method, because the method invocation time is close to zero.
OpenGL is a reasonably abstract API for doing 3D graphics.
In the past I did an example of OpenGL using GLUT.
However GLUT is a bit outdated now and a more modern alternative is GLFW.
The example still uses GLEW to setup the OpenGL extensions.
This example is minimal and only uses a vertex shader and a fragment shader to get started with OpenGL.
For an example using tesselation and geometry shaders as well, see my short introduction to OpenGL.
Note that it is important to add code for retrieving error messages (as I have done below) in order to be able to do development of the shaders.
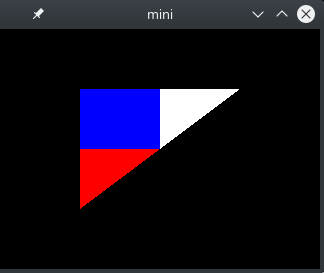
As in my old example, the code draws a coloured triangle on the screen.
// Minimal OpenGL example using GLFW and GLEW#include<math.h>
#include<stdio.h>
#include<GL/glew.h>
#include<GLFW/glfw3.h>// Vertex shader source code:// This shader takes in vertex positions and texture coordinates,// passing them to the fragment shader.constchar*vertexSource="#version 130\n\
in mediump vec3 point;\n\
in mediump vec2 texcoord;\n\
out mediump vec2 UV;\n\
void main()\n\
{\n\
gl_Position = vec4(point, 1);\n\
UV = texcoord;\n\
}";// Fragment shader source code:// This shader samples the color from a texture based on UV coordinates.constchar*fragmentSource="#version 130\n\
in mediump vec2 UV;\n\
out mediump vec3 fragColor;\n\
uniform sampler2D tex;\n\
void main()\n\
{\n\
fragColor = texture(tex, UV).rgb;\n\
}";GLuintvao;// Vertex Array ObjectGLuintvbo;// Vertex Buffer ObjectGLuintidx;// Index Buffer ObjectGLuinttex;// TextureGLuintprogram;// Shader programintwidth=320;// Width of window in pixelsintheight=240;// Height of window in pixels// Function to handle shader compile errorsvoidhandleCompileError(constchar*step,GLuintshader){GLintresult=GL_FALSE;glGetShaderiv(shader,GL_COMPILE_STATUS,&result);if(result==GL_FALSE){charbuffer[1024];glGetShaderInfoLog(shader,1024,NULL,buffer);if(buffer[0])fprintf(stderr,"%s: %s\n",step,buffer);};}// Function to handle shader program link errorsvoidhandleLinkError(constchar*step,GLuintprogram){GLintresult=GL_FALSE;glGetProgramiv(program,GL_LINK_STATUS,&result);if(result==GL_FALSE){charbuffer[1024];glGetProgramInfoLog(program,1024,NULL,buffer);if(buffer[0])fprintf(stderr,"%s: %s\n",step,buffer);};}// Vertex data:// Each vertex has a position (x, y, z) and a texture coordinate (u, v)GLfloatvertices[]={0.5f,0.5f,0.0f,1.0f,1.0f,// Top right-0.5f,0.5f,0.0f,0.0f,1.0f,// Top left-0.5f,-0.5f,0.0f,0.0f,0.0f// Bottom left};// Indices for drawing the triangleunsignedintindices[]={0,1,2};// Texture BGR data for a 2x2 texturefloatpixels[]={0.0f,0.0f,1.0f,0.0f,1.0f,0.0f,1.0f,0.0f,0.0f,1.0f,1.0f,1.0f};intmain(intargc,char**argv){// Initialize GLFW library.glfwInit();// Create a window.GLFWwindow*window=glfwCreateWindow(width,height,"minimal OpenGL example",NULL,NULL);// Set current OpenGL context to window.glfwMakeContextCurrent(window);// Initialize GLEW library.glewInit();glViewport(0,0,width,height);// Compile and check vertex shader.GLuintvertexShader=glCreateShader(GL_VERTEX_SHADER);glShaderSource(vertexShader,1,&vertexSource,NULL);glCompileShader(vertexShader);handleCompileError("Vertex shader",vertexShader);// Compile and check fragment shader.GLuintfragmentShader=glCreateShader(GL_FRAGMENT_SHADER);glShaderSource(fragmentShader,1,&fragmentSource,NULL);glCompileShader(fragmentShader);handleCompileError("Fragment shader",fragmentShader);// Link and check shader program.program=glCreateProgram();glAttachShader(program,vertexShader);glAttachShader(program,fragmentShader);glLinkProgram(program);handleLinkError("Shader program",program);// Create a vertex array object which serves as context for the// vertex buffer object and the index buffer object.glGenVertexArrays(1,&vao);glBindVertexArray(vao);// Initialize vertex buffer object with the vertex data.glGenBuffers(1,&vbo);glBindBuffer(GL_ARRAY_BUFFER,vbo);glBufferData(GL_ARRAY_BUFFER,sizeof(vertices),vertices,GL_STATIC_DRAW);// Initialize the index buffer object with the index data.glGenBuffers(1,&idx);glBindBuffer(GL_ELEMENT_ARRAY_BUFFER,idx);glBufferData(GL_ELEMENT_ARRAY_BUFFER,sizeof(indices),indices,GL_STATIC_DRAW);// Set up layout of vertex buffer object.glVertexAttribPointer(glGetAttribLocation(program,"point"),3,GL_FLOAT,GL_FALSE,5*sizeof(float),(void*)0);glVertexAttribPointer(glGetAttribLocation(program,"texcoord"),2,GL_FLOAT,GL_FALSE,5*sizeof(float),(void*)(3*sizeof(float)));// Enable depth testing using depth buffer.glEnable(GL_DEPTH_TEST);// Switch to the shader program.glUseProgram(program);// Enable the two variables of the vertex buffer layout.glEnableVertexAttribArray(glGetAttribLocation(program,"point"));glEnableVertexAttribArray(glGetAttribLocation(program,"texcoord"));// Initialize texture.glGenTextures(1,&tex);// Bind texture to first slot.glActiveTexture(GL_TEXTURE0);glBindTexture(GL_TEXTURE_2D,tex);// Set uniform texture in shader object to first texture.glUniform1i(glGetUniformLocation(program,"tex"),0);// Load pixel data into texture.glTexImage2D(GL_TEXTURE_2D,0,GL_RGB,2,2,0,GL_BGR,GL_FLOAT,pixels);// Set texture wrapping mode and interpolation modes.glTexParameteri(GL_TEXTURE_2D,GL_TEXTURE_WRAP_S,GL_REPEAT);glTexParameteri(GL_TEXTURE_2D,GL_TEXTURE_MIN_FILTER,GL_NEAREST);glTexParameteri(GL_TEXTURE_2D,GL_TEXTURE_MAG_FILTER,GL_NEAREST);// Initialize multiresolution layers.glGenerateMipmap(GL_TEXTURE_2D);// Loop until the user closes the window.while(!glfwWindowShouldClose(window)){// Clear color buffer and depth buffer.glClearColor(0.0f,0.0f,0.0f,0.0f);glClear(GL_COLOR_BUFFER_BIT|GL_DEPTH_BUFFER_BIT);// Switch to the shader program.glUseProgram(program);// Draw triangle(s).glDrawElements(GL_TRIANGLES,3,GL_UNSIGNED_INT,(void*)0);// Swap front and back buffers.glfwSwapBuffers(window);// Poll for and process events.glfwPollEvents();};// Disable the two shader variables.glDisableVertexAttribArray(glGetAttribLocation(program,"point"));glDisableVertexAttribArray(glGetAttribLocation(program,"texcoord"));// Unbind and delete the texture.glBindTexture(GL_TEXTURE_2D,0);glDeleteTextures(1,&tex);// Unbind and delete the index buffer object.glBindBuffer(GL_ELEMENT_ARRAY_BUFFER,0);glDeleteBuffers(1,&idx);// Unbind and delete the vertex buffer object.glBindBuffer(GL_ARRAY_BUFFER,0);glDeleteBuffers(1,&vbo);// Unbind and delete the vertex array object.glBindVertexArray(0);glDeleteVertexArrays(1,&vao);// Unlink and delete the shader program.glDetachShader(program,vertexShader);glDetachShader(program,fragmentShader);glDeleteProgram(program);glDeleteShader(vertexShader);glDeleteShader(fragmentShader);// Set OpenGL context to NULL.glfwMakeContextCurrent(NULL);// Destroy window.glfwDestroyWindow(window);// Terminate GLFW.glfwTerminate();return0;}
The example uses the widely supported OpenGL version 3.1 (which has the version tag 130).
You can download, compile, and run the example as follows:
In the past I have experimented with sequential impulses to implement constraints (see
part 1,
part 2,
part 3,
part 4,
part 5,
part 6 of my rigid body physics series).
I tried to integrate Runge-Kutta integration with sequential impulses.
However it was difficult to prevent interpenetration of objects.
Also implementing a vehicle with wheels and suspension, where the weight ratio between the vehicle and the wheels was high, required a high number of iterations to stabilise.
Finally stacking of boxes turned out to be unstable.
In the following I have provided a few Jolt physics example programs to demonstrate some capabilities of the physics engine.
Installing Jolt
Jolt Physics is a C++ library built using CMake.
To compile with double precision, I invoked JoltPhysics/Build/cmake_linux_clang_gcc.sh as follows:
cd Build
./cmake_linux_clang_gcc.sh Release g++ -DCMAKE_POSITION_INDEPENDENT_CODE=ON -DDOUBLE_PRECISION=ON \-DDEBUG_RENDERER_IN_DEBUG_AND_RELEASE=OFF -DPROFILER_IN_DEBUG_AND_RELEASE=OFF
A release build with g++ and installation is done as follows:
cd Linux_Release
make -j`nproc`sudo make install
cd ../..
Next you can have a look at JoltPhysics/HelloWorld/HelloWorld.cpp which is a simple example of a sphere bouncing on a floor.
The example shows how to implement the required layers and collision filters (e.g. stationary objects cannot collide with each other).
Make sure to define the Trace variable so you get useful warnings if something goes wrong.
Tumbling object in space
In this section we test the tumbling motion of a cuboid in space.
To compile a C++ program using Jolt, you need to use the same preprocessor definitions which were used to compile Jolt.
If you have set up the Trace function, you will get a warning if the preprocessor definitions do not match.
Here is an example Makefile to compile and link a program with the release build of the Jolt library, GLFW, and GLEW.
The core of the example creates a shape of dimension a×b×c and sets the density to 1000.0.
Furthermore the convex radius used for approximating collision shapes needs to be much smaller than the object dimensions.
The limit for the linear velocity is lifted and most importantly the solution for gyroscopic forces is enabled.
Furthermore linear and angular damping are set to zero.
Finally the body is created, added to the physics system, and the angular velocity is set to an interesting value.
The code snippet is shown below:
In this section we test the falling motion of a stack of cuboids.
Three cuboids are created and the initial positions are staggered in the x direction to get a more interesting result.
Using i = 0, 1, 2 the cuboids are created in the following way:
Furthermore a ground shape is created.
Note that for simplicity I only created one layer.
If the ground was composed of multiple convex objects, a static layer should be created and used.
The double pendulum is created using the HingeConstraintSettings class.
There are two hinges.
One between the base and the upper arm of the pendulum and one between the upper arm and the lower arm.
The physics library also requires initialisation of a vector normal to the hinge axis.
Another test case is a prismatic joint with a suspension constraint.
The prismatic joint is created using the SliderConstraintSettings class.
The suspension is created using a soft distance constraint.
The code snippet is shown below:
Jolt comes with a specialised implementation for simulating wheeled vehicles (there is also even one for tracked vehicles).
The vehicle API allows placing the wheels and adjusting the suspension minimum and maximum length.
One can set the angular damping of the wheels to zero.
Furthermore there are longitudinal and lateral friction curves of the wheels which I haven’t modified.
Finally there is a vehicle controller object for setting motor, steering angle, brakes, and hand brake.
Note that there is a mMinVelocityForRestitution setting.
I.e. if two bodies collide at a velocity below that (default is 1.0 m/s), an inelastic collision will occur.