Rigid body game physics
24 Oct 2019part 1 part 2 part 3 part 4 part 5 part 6
Inspired by Hubert Eichner’s articles on game physics I decided to write about rigid body dynamics as well. My motivation is to create a space flight simulator. Hopefully it will be possible to simulate a space ship with landing gear and docking adapter using multiple rigid bodies.
The Newton-Euler equation
Each rigid body has a center with the 3D position c. The orientation of the object can be described using a quaternion q which has four components. The speed of the object is a 3D vector v. Finally the 3D vector ω specifies the current rotational speed of the rigid body.
The time derivatives (indicated by a dot on top of the variable name) of the position and the orientation are (Sauer et al.):
 The multiplication is a quaternion multiplication where the rotational speed ω is converted to a quaternion:
The multiplication is a quaternion multiplication where the rotational speed ω is converted to a quaternion:

In a given time step Δt the position changes as follows

The orientation q changes as shown below
 Note that ω again is converted to a quaternion.
Note that ω again is converted to a quaternion.
Given the mass m and the sum of external forces F the speed changes like this
 In other words this means
In other words this means

Finally given the rotated inertia matrix I(t) and the overall torque τ one can determine the change of rotational speed
 Or written as a differential equation
Or written as a differential equation

These are the Newton-Euler equations. The “x” is the vector cross product. Note that even if the overall torque τ is zero, the rotation vector still can change over time if the inertial matrix I has different eigenvalues.
The rotated inertia matrix is obtained by converting the quaternion q to a rotation matrix R and using it to rotate I₀:

The three column vectors of R can be determined by performing quaternion rotations on the unit vectors.
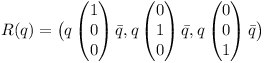 Note that the vectors get converted to quaternion and back implicitely.
Note that the vectors get converted to quaternion and back implicitely.
According to David Hammen, the Newton-Euler equation can be used unmodified in the world inertial frame.
The Runge-Kutta Method
The different properties of the rigid body can be stacked in a state vector y as follows.
 The equations above then can be brought into the following form
The equations above then can be brought into the following form
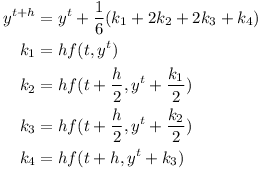
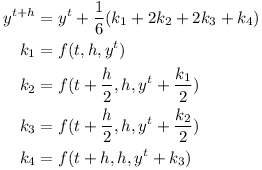
 Using h=Δt the numerical integration for a time step can be performed using the Runge-Kutta method:
Using h=Δt the numerical integration for a time step can be performed using the Runge-Kutta method:
The Runge-Kutta algorithm can also be formulated using a function which instead of derivatives returns infitesimal changes

The Runge-Kutta formula then becomes
Using time-stepping with F=0 and τ=0 one can simulate an object tumbling in space.